

はじめに
船舶が航海をするためには、自船の位置を求めることが不可欠です。本記事では地文航法の「位置の求め方」の概要についてまとめたいと思います。主にこれから海技知識の勉強を始める方に向けた記事です。
目標物を使って位置を求めるのは陸も海も同じ
日頃、私たちは、意識的にまたは無意識のうちに現在地を把握して移動しています。陸上では分かり易い建物や交差点を目印にしますが、海上でも基本的には同様です。ただ、広い海上では陸上に比べると参考にできる建物が少ないため、船舶が位置を求める際には、陸上にある灯台や工場の煙突、電波塔などを参考にします。
しかし、目に見える道路も無く、陸上に比べて圧倒的に目標物が少ない海上においては、それらの目標物を見ただけで自船の位置を把握する事は不可能です。そこで、コンパスやレーダーを使って、陸上の目標の方位や距離を測定し、航海(地文航法)しています。以下では、その具体的な例について見てみます。
クロスベアリング
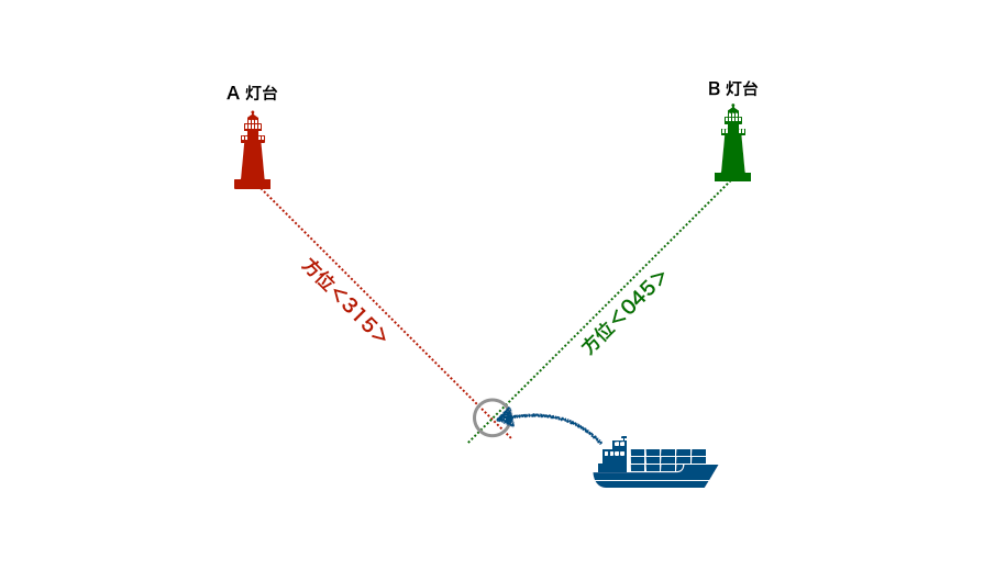
海図等で位置が正確に分かる複数の物標を使用し、それらの方位を(ほぼ)同時に測定する事で位置を知る方法です。下図に示すように、それぞれの目標の方位を測定した場合、必ずその方位線が交差し、逆に言えば、その交差した位置が船の位置となります。船位を求める最も基本的な方法で、航海訓練を行う練習船や実習船では必ず習います。
測定する物標を増やすほど理論上精度は高くなりますが、移動している船上で、一人の人間が同時に複数の目標の方位を測定することは不可能で、測定する際には必ず測定する時間差と測定誤差が生じます。したがって実際にはこれらの方位線は綺麗に1カ所で交わらず、 下図に示すように三(多)角形が生じます。これを一般的には「誤差三角形(コックド・ハット)」と呼び、実務上は(各目標を測定した際の誤差がそれぞれ同じと仮定して)三角形の中心を船の位置としています。なお、生じた三角形が明らかに大きい場合には、誤差が大きい証拠なので、方位測定をやり直す事になります。
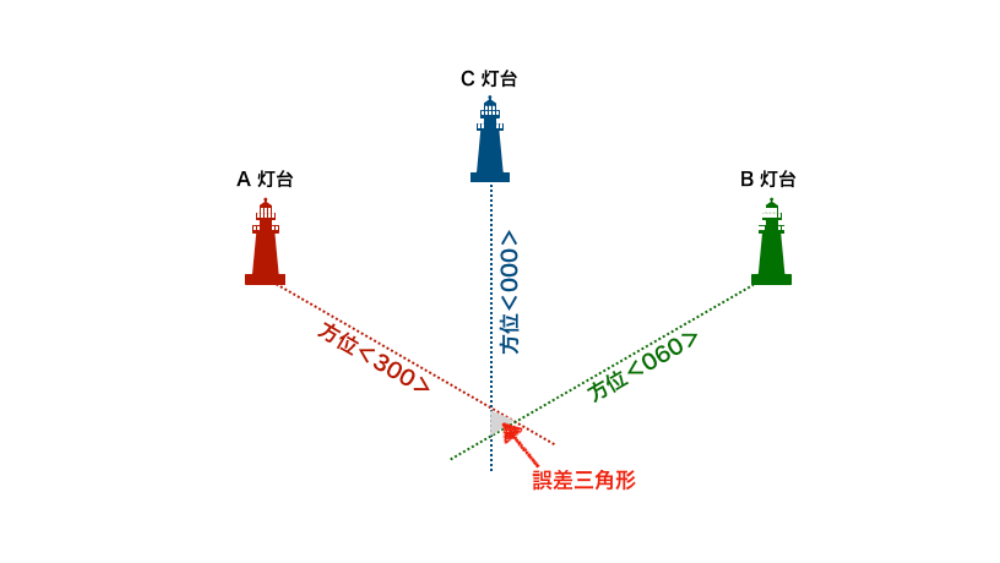
測定する物標は等間隔であるほど良いため、例えば2つの目標を測定する場合には交角が90度、3つの場合には60度であるのが理想的です。
物標が一つのときには?
海上では複数の陸上目標を確認できない場合もあります。その際に1つの物標のみで位置を求める方法がランニングフィックスです。位置が正確に分かる陸上の物標の方位を時間間隔をあけて複数回測定し、船の位置を求めます。具体的には、一回目の測定後、一定の針路・速力(針路・速力が明らかである必要があります)で航行した後、再度同じ物標の方位を測定します。
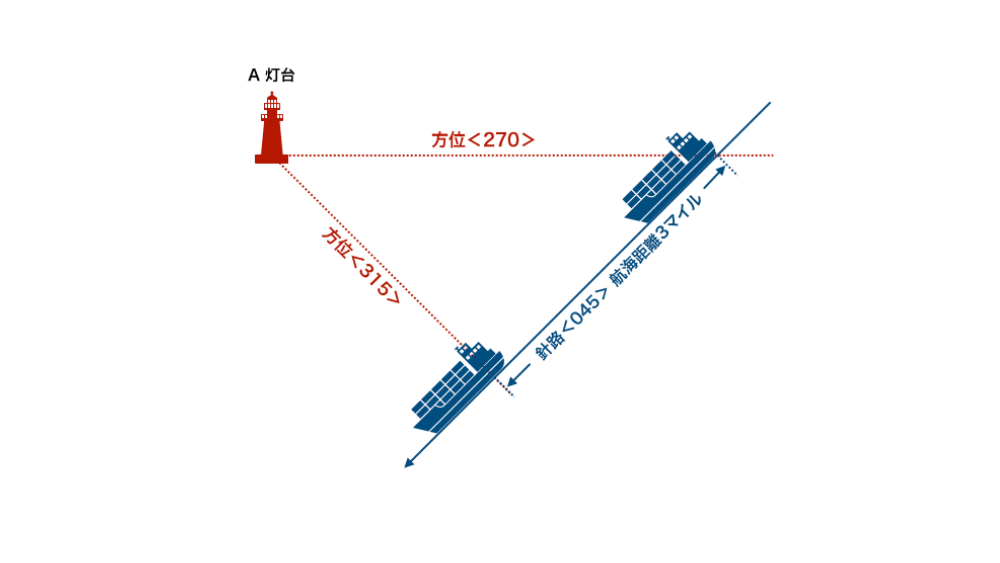
実際の航海では風や潮流などの影響があり、海図上で推定する航跡と実際に航海した航跡が異なります。したがって、精度は一般的にクロスベアリングよりも低くなります。物標が一つの場合の位置の求め方には複数ありますが、基本的な考え方は同じです。
位置の線とは
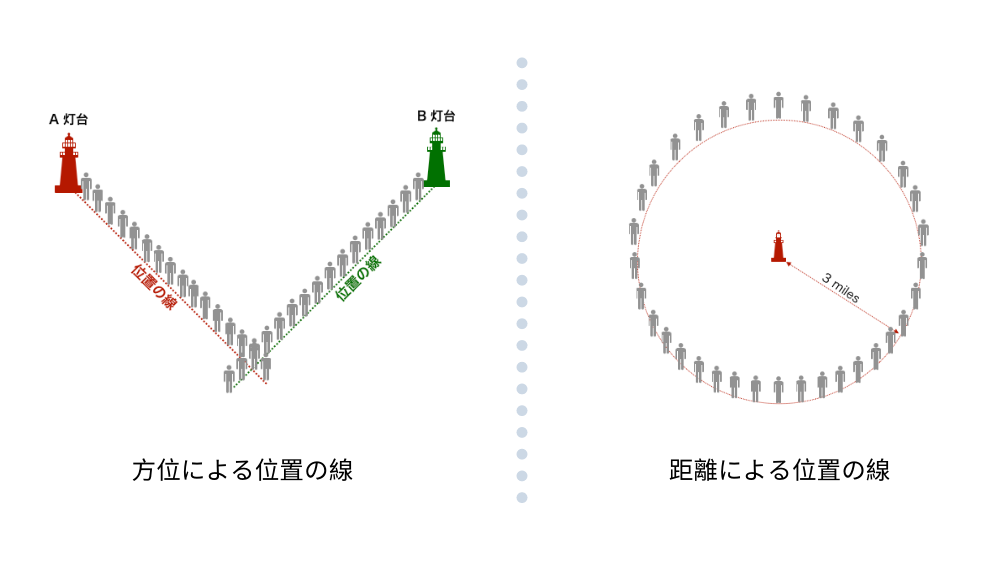
実は、上述の測定時にできる方位線は、その物標が同じ方位離に見える地点を、無数に集めてできた線と同じです。すなわち、この線1本1本が「その線上のどこかに船が居る」という事を示す線となるのです。この線は「位置の線」と呼ばれ、今回紹介した方位だけでなく距離や高度からも導かれます。天体の位置から船位を求めて航海する天文航法や、地上の電波発信局や人工衛星などを利用して航海する電波航法でも出てくる用語になります。
測定する目標物:物標(ぶっぴょう)
船の位置:船位
複数の物標を同時に測定:同時観測
複数の物標を時間間隔をあけて測定:隔時観測