
![]() 藤井 迪生
藤井 迪生
新人航海士が陥りやすい罠「東京湾に向かいたいのに向かえない…」
入社したての次席三等航海士が、指導役の一等航海士に見守られながら、初めての内地帰港に向けて東京湾にアプローチする。ところが、右から来る横切り船を避けているうちに、どんどんと東に針路がズレていき、東京湾に向かうことができない。
よく聞く「あるある話」ですが、この話には教科書通り(あるいは学校の先生が言う通り)ではうまくいかない、実務ならではの難しさが隠れているのではないでしょうか。安全運航が絶対条件であることは言わずもがなですが、実務現場では安全性だけでなく経済性のバランスを意識的または無意識のうちに考慮しており、先の話には両者のバランスが取れないとうまくいかないという事実が隠れていると私には感じます。
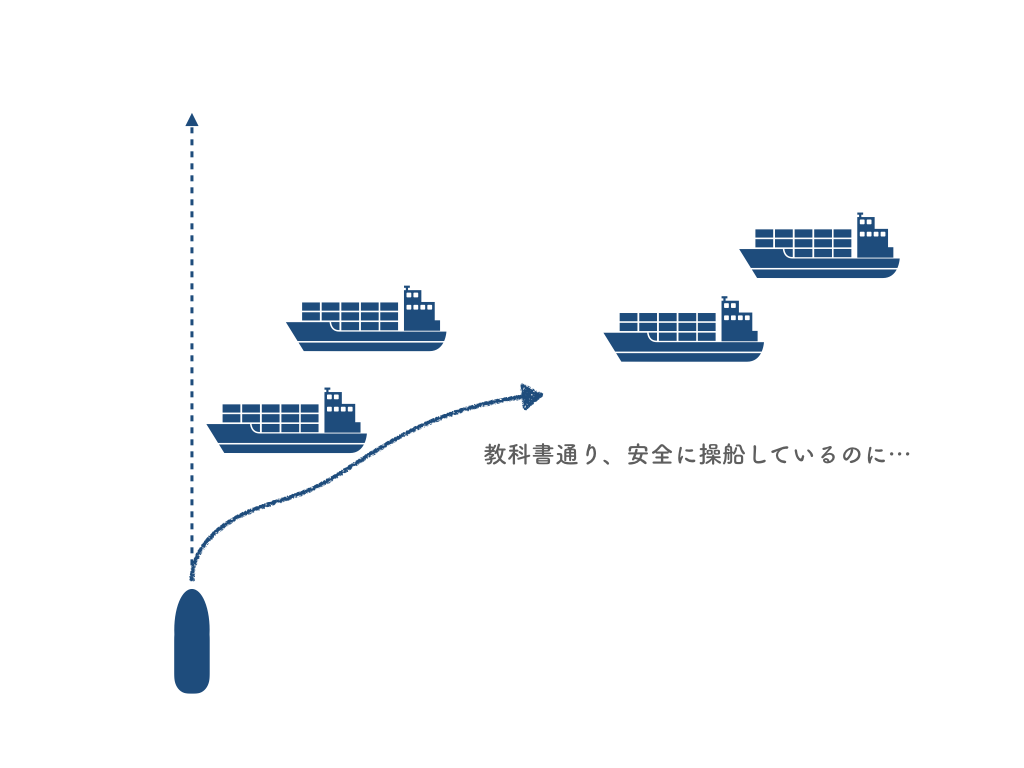
横切り船が多数あり、目的地に向かえない
経験者へのヒヤリングやアンケートでは見えてこない実務現場での複雑な状況判断
以下の記事で紹介した「太平洋の遭遇波高に関する研究」で、複数のベテランのキャプテンに運航判断の基準についてヒヤリングをさせて頂いた際に私自身も実感しましたが、「一般的にはAの基準で運航している」が、「Bの条件のときにはCの基準で判断している」という様に、現場では複数の条件が絶妙にバランスして運航が行われています。同様のことが避航操船でも存在すると考えられ、操船者は単に目の前の船を避けているわけではなく、それぞれの条件の絶妙なバランスが取れた最適な針路を選択していると言えます。

人間が構築したモデル式を使った自動操船
海上交通工学の分野では実際の交通流を再現するツールとして「海上交通流シミュレーション」が開発され、活用されています。このシミュレーションでは、種々の条件下における交通流を模擬するために、衝突の危険性のある他船を自動で避航するアルゴリズムが必要で、これまで実際の交通流の実態や操船者へのアンケートや実験結果から複数のモデルが提案されてきました。神戸大学の谷口裕樹学術研究員らは、このアルゴリズムのうち、「長澤モデル」と呼ばれる「大洋において1隻対1隻の避航を想定して開発されたモデル」を利用し、輻輳海域でも他船を自動で避航できるかを大型水槽に浮かべた複数の自走式模型船を使って検証しました[1]。その結果、関係船が2隻の避航操船では問題なく避航できましたが、3隻になると衝突が発生し、4隻の場合では、パラメータを調整しても近距離の他船の急な大変針に対して衝突が発生する場面が見られました。モデルの想定範囲外では対応しきれないという、この手法の短所が現れた結果ですが、過去の経験に基づいたモデル式は想定を超える状況には対応できないのは当然で、適用範囲が広がるように、様々な研究機関や企業で改良が行われています。
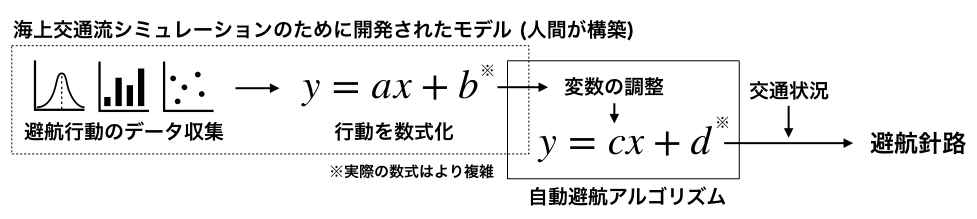
海上交通流シミュレーションのモデルを基礎とした自動避航のプロセス(イメージ)
人工知能が構築したモデル式を使った自動操船
一方、近年話題になっている人工知能(機械学習)では、ビッグデータのような莫大なデータについて、コンピュータ・プログラムを使って各要素の関係性や特徴を把握し、適切と思われるモデル式を自動で算出します。大連海事大学のShen氏と神戸大学の橋本博公准教授らの研究グループは、機械学習の一種である深層強化学習(Deep Q-Learning)技術を使うことで狭水域での自動衝突回避が行えるか、模型実験により検証しました[2]。具体的には、まず、ランダムに発生させた交通流の中でコンピュータに膨大な数の避航操船を試行させ、うまく避航できるモデル式を算出(学習)させました。その後、そのモデル式を搭載した3隻の自走式模型船を用いて、他船を自動で避航できるかを検証しました。その結果、非常に狭く輻輳した海域であっても衝突回避が可能であることが示されました。
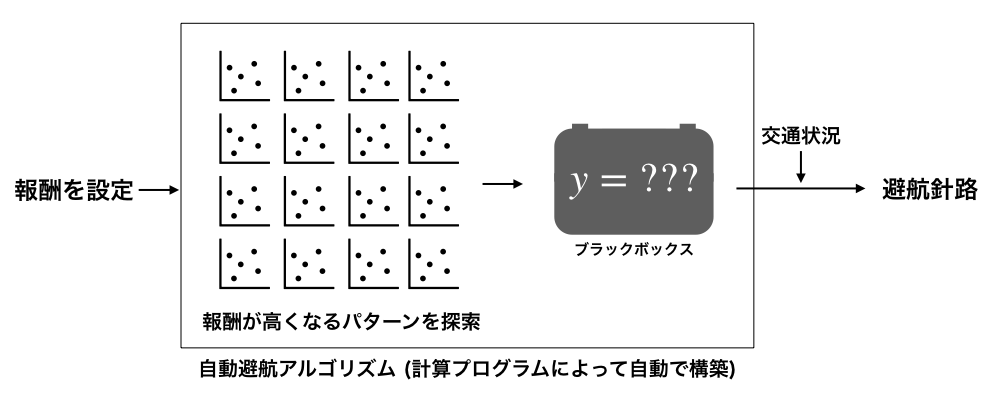
人工知能(Deep Q-Learning)を基礎とした自動避航のプロセス(イメージ)
複雑な条件に威力を発揮する人工知能だが、ブラックボックス問題は残る
過去のデータを使ってモデル式を構築し、その式を使って将来の状況を予想する手順はどちらも同じですが、先に述べた「新人航海士が陥りやすい罠」のように、避航操船では複数の条件が絶妙にバランスした針路を選択する必要があります。条件が複雑な問題には「人間が構築するモデル式」よりも「人工知能を使って構築するモデル式」の方が適す場合があるとされています。一方で、人工知能が構築したモデルは高精度の予測と引き換えに、なぜコンピュータがその結果を算出したのか理由が説明できない「ブラックボックス」問題が存在します。コンピュータ・サイエンスの分野では、算出根拠が説明可能な人工知能の研究も進められており、ブラックボックス問題は将来的には解決されるかもしれませんが、現状、答えが正しくても、なぜその答えが出てきたのか分からないという欠点があります。
人工知能に伝えるべき「報酬」の検討はこれから
実は、Deep Q-Learningでは、コンピュータが全て自動で学習していくのではなく、「報酬」と呼ばれるパラメータを予め定義しておかなければなりません。例えば、先にご紹介した研究では「衝突の有無と他船の航過距離」を報酬としており、他船との距離を広く取りながら航行できるほど報酬が高くなり、逆に衝突すると報酬が極端に低くなる式が組み込まれています。この「報酬」を工夫することで、安全性と経済性を考慮したモデルが理論上構築できますが、逆に言えば、適切な報酬を定義しない限りモデルは構築できません。現在、私たちは実務者の運航技術の数値データを参考に神戸大学と共同で適切な「報酬」の検討を進めています。結果は、時期を見て船学でもご紹介したいと思います。
おわりに
今回は、現在研究が進んでいる船舶の自動操船技術がどのような手法で実現されようとしているのか、その一部をご紹介しました。
人工知能は1950年台に学問として確立され、以後、複数回の人工知能ブームを経て現在に至るとされています。昨今の人工知能ブームがいつまで続くかは分かりませんが、技術は確実に進歩しています。最新の技術の中には船上業務の低減に役立つ技術が眠っていると考えるのが自然であり、それを発見するためには研究を正しい方向に導く必要があると考えています。コメント欄にご意見やご指摘をお寄せいただければ幸いです。
参考文献
[1] 谷口裕樹; 松田秋彦; 世良亘; 寺田大介; 橋本博公, 輻輳海域における船舶自動避航アルゴリズムの模型実験による検証, 日本船舶海洋工学会講演会論文集, 23, 627-632, 2016
[2] Haiqing Shen; Hirotada Hashimoto; Akihiko Matsuda; Yuuki Taniguchi; Daisuke Terada, Automatic Collision Avoidance of Ships in Congested Area Based on Deep Reinforcement Learning, 日本船舶海洋工学会講演会論文集, 24, 651-656, 2017